| Главная » Файлы » Техника и Технологии |
Рыборобот: Всенаправленный пловец
| 25.01.2011, 18:33 | |
Современные подводные аппараты никак не могут похвастаться достаточной маневренностью и ловкостью движений в этой непростой среде. Кроме одного – прототип этой почти что рыбы был продемонстрирован недавно.  Рыба-ножелетка: всенаправленная чувствительность благодаря электричеству, всенаправленное движение благодаря цельному плавнику, протянувшемуся через все тело 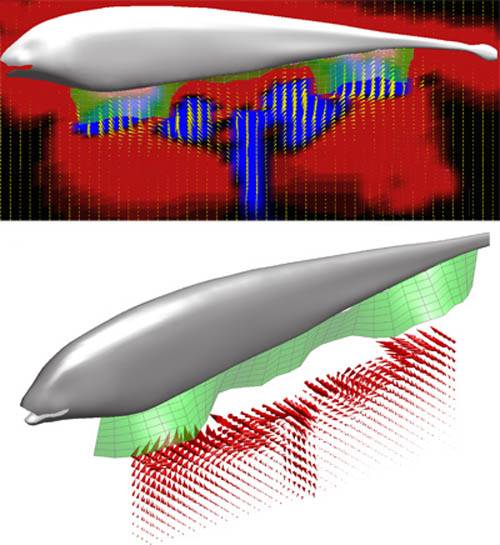 Моделирование робота на компьютере 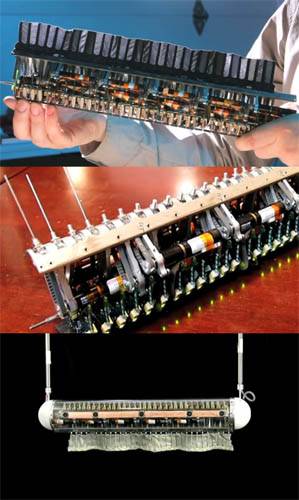 Миниатюрные сервоприводы контролируют движение 32-х независимых стержней, на которых размещается упругая мембрана «плавника». На все работы по аппарату было затрачено 200 тыс. долларов и 7 месяцев труда Источником вдохновения для создателей этой роботизированной системы послужила черная ножелетка, очень интересная тропическая рыбка, обитающая в бассейне Амазонки. Интересна она по двум причинам. Обитая в крайне мутной воде, она научилась ориентироваться в окружении не с помощью зрения или обоняния, а посредством слабых электрических полей, которые создают клетки, расположенные по поверхности всего ее тела. Изменения в этих полях, вызванные другими объектами, мигом замечаются этой замечательной рыбкой. Это удобно еще и потому, что ножелетка получает возможность «видеть» во всех направлениях сразу. Соответственно, у нее развились механизмы, обеспечивающие и всенаправленное движение. Длинный анальный плавник протянулся вдоль всего брюшка, достигая головы. Волны, пробегающие по его гибкой ленте, позволяют рыбе двигаться куда угодно во всей толще воды. Такого биомиметического робота решили создать и ученые, работающие под руководством профессора Малькольма МакИвера (Malcolm MacIver) – они хотят получить действительно маневренный аппарат, способный проводить необходимые работы под водой и быть достаточно ловким, чтобы с близкого расстояния проводить наблюдения даже в лабиринтах коралловых рифов. Для начала были проведены исследования самой рыбы-ножелетки, чтобы понять механизмы ее всенаправленного движения, затем подготовлены компьютерные модели такого аппарата, и лишь на третьем этапе ученые приступили к созданию робота, названного GhostBot. Он способен имитировать и те движения плавника рыбы, которые она использует для проталкивания по горизонтали – длинная волна, пробегающая по всей ленте плавника, – и те, которые обеспечивают перемещение по вертикали – две волны, одна из которых движется от хвоста, другая от головы рыбы, и встречаются в середине тела. В последнем случае горизонтальные течения воды, создаваемые волнами на плавнике, встречают друг друга и, смешиваясь, формируют направленную вниз струю, которая и подталкивает тело рыбы вверх. Прототип GhostBot оснащен 32-мя независимыми электромоторчиками, каждый из которых способен направлять металлические стерженьки на «брюхе» робота вправо или влево. Стерженьки соединены упругой лентой искусственного плавника, покрытого водонепроницаемой лайкрой. В ходе тестирования робот погружался в камеру, где создавалось искусственное течение воды, а вода заполнялась мелкими светоотражающими частицами. Подсвечивая их лазерным лучом, можно увидеть создаваемые движениями робота потоки. Все прошло, как по маслу – точнее, по строго предсказаниям компьютерной модели. The Incredible Robot Fish from Northwestern News on Vimeo. GhostBot комплектуется и «электросенсорной» системой, схожей с той, которой обладает и рыба-ножелетка. В перспективе, конечно, он будет ориентироваться и двигаться с ее помощью, совершенно независимо от оператора. | |
| Просмотров: 807 | Загрузок: 0 | | |
| Всего комментариев: 0 | |