| Главная » Файлы » Техника и Технологии |
Робот думает о будущем: Прогноз благоприятный
| 02.06.2011, 00:45 | |
Большой шаг вперед к созданию полноценно работающих в реальных условиях роботов – алгоритм, позволяющий им планировать свои действия. На шаг вперед.
Все мы с нетерпением ждем момента, когда же домашний робот станет таким же обычным, как домашний компьютер, и возьмет на себя бытовые хлопоты. Увы – пока что все ограничивается не слишком расторопными автоматизированными пылесосами, а мечты о роботах, способных приготовить завтрак или постирать белье, так и остаются мечтами.
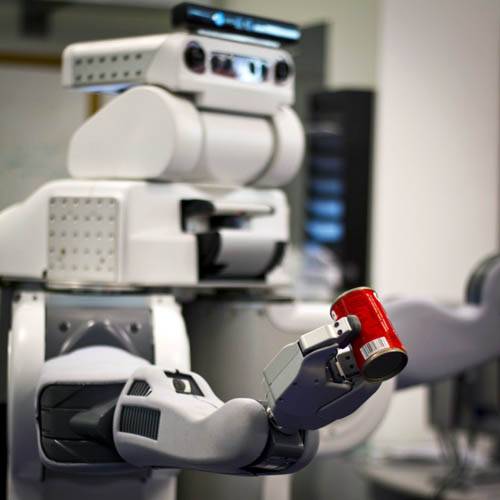
Тестирование алгоритма прошло с использованием робота PR2. Он продемонстрировал способности заранее просчитывать действия, которые необходимо совершить, чтобы открыть банку колы
Дело в том, что даже такие задачи, не вызывающие у большинства из нас никаких затруднений, для роботов представляют огромные сложности. Чтобы научить их делу, ученые решили отойти от традиционного подхода – максимально подробно и с учетом всех возможных ситуаций описать в управляющей программе все необходимые действия – и научили робота самостоятельно составлять план. Результаты нового подхода Томас Лозано-Перец (Tomas Lozano-Perez) и Лесли Кэблинг (Leslie Kaelbling) представили лишь на прошлой неделе. В качестве платформы для апробации алгоритма они выбрали широко известного робота Willow Garage PR2, популярного у разработчиков и робототехников – вспомним хотя бы, как другая группа научила его весьма эффектно складывать полотенце.
Томас Лозано-Перец и Лесли Кэблинг со своим роботом
С новым алгоритмом робот самостоятельно подбирает последовательность действий, необходимых для выполнения конечной задачи, составляет из них себе пошаговую инструкцию, и терпеливо выполняет ее, шаг за шагом. Иначе говоря, вместо автоматического выполнения задания оно сперва проходит два больших этапа, планирования действий и планирования необходимых движений. Лишь после этого робот приступает к делу, не заглядывая слишком далеко вперед. Например, робот получил команду позвонить другу Васе. Прежде всего он выделит необходимость найти телефон, для чего сперва нужно пройти по комнатам – пока не переходя от планирования действия к расчету движений, необходимых для того, чтобы взять телефон с того места, где он будет найден. Пока у робота имеется и другая задача – обсчет движений, необходимых для перемещения по комнатам, а следующая задача будет решаться в свой черед. По плану. Разбив всю задачу на список последовательных операций, робот обсчитывает и совершает их последовательно, шаг за шагом, в соответствии с новой поступившей информацией. Допустим, аналогичную задачу по поиску телефона получит робот, работающий на традиционных алгоритмах. Первым делом он займется созданием приблизительной трехмерной карты всего района поисков – тогда как новый алгоритм позволяет конструировать ее постепенно, охватывая лишь нужный в ближайшее время участок. Это и экономит его ресурсы, и позволяет гибче подходить к изменениям обстановки и условий. | |
| Просмотров: 702 | Загрузок: 0 | | |

| Всего комментариев: 0 | |