| Главная » Файлы » Техника и Технологии |
Японцы учат робота ходить по Луне
| 21.12.2010, 03:26 | |
Специалисты смоделировали на компьютере схему движения робота по лунной поверхности. Согласно предварительным выводам, самыми эффективными являются прыжки на двух ногах.
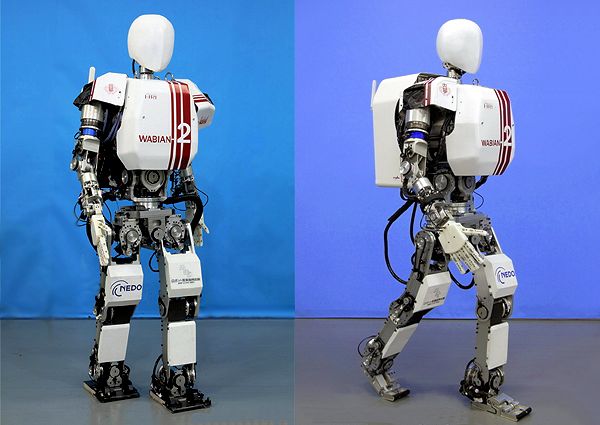
Робот WABIAN-2R.
Как известно, гравитация на Земле примерно в шесть раз сильнее, чем на её спутнике. Поэтому передвигавшиеся по Луне астронавты замечали, что обычная ходьба даётся непросто — легче использовать бег с подскоками. Для того чтобы определить, подходит ли такой способ передвижения для роботов, Ацуо Таканиши из Университета Васэда и коллеги разработали программу для изучения походки человекоподобного устройства WABIAN-2R. Этот робот высотой 1,5 метра и весом 64,5 кг предназначен для помощи людям в повседневной жизни. Компьютерная модель была продемонстрирована на конференции ROBIO 2010, прошедшей с 14 по 18 декабря в китайском Тяньцзине. Выяснилось, что робот в принципе способен отталкиваться от лунной поверхности и приземляться без потери равновесия. Однако при прыжках высотой до 0,8 м скорость андроида существенно снижается, а прыжки на полтора метра в высоту могут привести к его падению. Дальнейшее изучение поможет установить идеальный баланс между скоростью и устойчивостью. Скорее всего, наиболее эффективным способом движения станут прыжки на двух конечностях, полагают разработчики. Использование двуногих роботов для исследования Луны и других небесных тел было предложено Японским агентством аэрокосмических исследований (JAXA) как альтернатива традиционным колёсным луноходам и марсоходам. Робот WABIAN-2R: | |
| Просмотров: 822 | Загрузок: 0 | | |
| Всего комментариев: 0 | |